Lesson 120

Lesson Objective: In this lesson, we will learn about the ball connection.
USAGE OF BALL CONNECTIONS
A ball connection is used to simulate a joint where the translation is completely fixed, but all rotational degrees of freedom are available.
You would use a ball connection to simulate:
· A shoulder/arm joint
· Vehicle suspension connections
· Toggle switches
· Any type of connection where all rotational degrees of freedom are enabled.
The ball connection is often used with other connection types in order to minimize the rotational degrees of freedom.
EXAMPLE – Toggle Switch
For this example, we will start an assembly that will be completed when we get to the lesson about cams. To demonstrate the ball connection, we will open the Toggle_Switch.asm assembly, which looks like the following.

Turn on the display of datum points, and assemble in the TS_Switch.prt component. When it comes in, click on the Connections section of the placement window, and change the connection type to Ball, as shown in the next figure.

You only have to pick two datum points, or two vertices as references. Therefore, we will pick on the BALL_POINT and SWITCH_POINT datum points in the two models, as shown below.
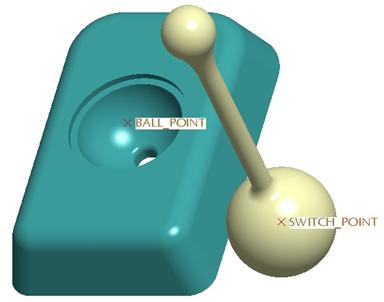
When we do this, the points will align with each other. Click on OK to complete this placement, and then go to Applications, Mechanism.
We can see the symbol for this ball connection, and it looks like one of those “atomic” symbols, as we can see in the next figure.

Click on the Drag tool, and try moving it around. Be sure NOT to stop it during the dragging, but use the middle mouse button to cancel the drag operation. We want it to stay upright for now.
You probably noticed that as you dragged the handle, it was free to rotate in any direction, even through the part. We will control this later in the Cam lesson.
Click on the joint axis symbol to highlight it in red, and then hold down the right mouse button. What do you notice? There are no joint settings for this connection type. Therefore, you will not be setting an absolute zero, and you won’t be adding any servo motors to this joint.
Any animation that will move this will have to be done by other components. Unfortunately, we will not have any other components in this assembly, so we will not be performing any analyses on this assembly.
Assemble in the TS_TOP.prt component. Use a Default placement for this last component. The completed assembly (for now) will look like the following.

Save and close this assembly. We will come back to it in the lesson on Cams.
LESSON SUMMARY
Ball connections are the simplest, easiest to use and set up. They only require two points or vertices to be aligned, and they have no joint settings.
EXERCISE
We will not have any exercises for this lesson, as it is simple enough.