|

Appendix Summary: In this Appendix, we will see the solutions to all of the exercises for this training guide.
Lesson 1 _________________________________________________________ A-2
Lesson 2 _________________________________________________________ A-2
Lesson 3 _________________________________________________________ A-10
Lesson 4 _________________________________________________________ A-18
Lesson 5 _________________________________________________________ A-20
Lesson 6 _________________________________________________________ A-22
Lesson 7 _________________________________________________________ A-30
Lesson 8 _________________________________________________________ A-32
Lesson 9 _________________________________________________________ A-37
Lesson 10 _________________________________________________________ A-41
Lesson 11 _________________________________________________________ A-48
Lesson 12 _________________________________________________________ A-57
Lesson 13 _________________________________________________________ A-57
Lesson 14 _________________________________________________________ A-58
Lesson 15 _________________________________________________________ A-66
Lesson 16 _________________________________________________________ A-74
Lesson 17 _________________________________________________________ A-77
Lesson 18 _________________________________________________________ A-78
Lesson 19 _________________________________________________________ A-79
Lesson 20 _________________________________________________________ A-80
Lesson 21 _________________________________________________________ A-82
Lesson 22 _________________________________________________________ A-83
Lesson 23 _________________________________________________________ A-83
LESSON 1 – Making Your Assemblies Dynamic
N/A
LESSON 2 – Pin Connection
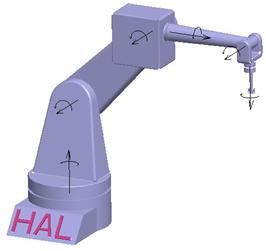
We start by opening up the Robot.asm assembly file, which looks like the following.

Robot_2.prt
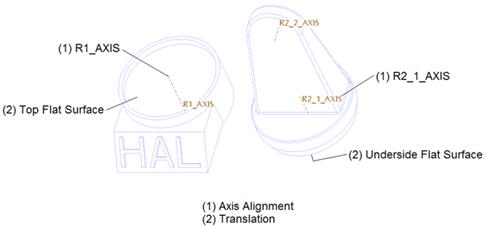
The first component we are adding is the rotating base of the assembly. Therefore, click on the assemble component icon and select the Robot_2.prt file. When the Placement Constraint window appears, click on the Connections bar to activate Mechanism Placement Constraints.
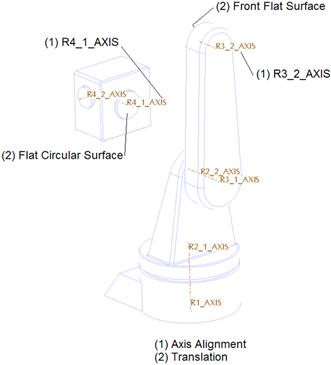
In the Type field, make sure that Pin is selected. Then, we will make sure that our datum axes are visible and pick on the following entities to assemble this component.
The fully assembled component will look like the next figure.

Now that the component is assembled, we will go to Applications,
Mechanism to drag it. Click on the drag icon ( ![]() ) and pick out on the large flat
angled surface of the newly assembled component. The diamond symbol will
appear, and you can begin to drag. The following figure shows the component
rotated.
) and pick out on the large flat
angled surface of the newly assembled component. The diamond symbol will
appear, and you can begin to drag. The following figure shows the component
rotated.

Click on the middle mouse button to cancel the rotation and return the model to the assembled orientation. Go to Applications, Standard to assemble the next component.
Robot_3.prt
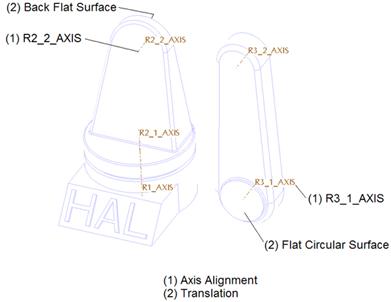
The next component will be the large arm that connects to the previous component. Click on the assemble component icon and select the Robot_3 part. Use a Pin connection and select the following entities to assemble this component.
The fully assembled component will look like the following.
Go to Applications, Mechanism to drag this component. The next figure shows one possible orientation while dragging the component.

NOTE: As we drag the new component, we will notice that the second component in the assembly will move through its range of motion. This will happen throughout this exercise as we add and move new components. In a later lesson, we will learn how to lock a body down to move only a particular set of components.
Click on the middle mouse button to cancel the drag and return to the assembled orientation. Go to Applications, Standard to assemble the next component.
Robot_4.prt
The next component will attach to the end of the Robot_3 component. Use the following entities to create the pin connection.
The fully assembled component looks like the following figure.
Use Applications, Mechanism to get back to mechanism mode and drag this new component, as shown below.

Click on the middle mouse button to cancel the drag, then go back to Applications, Standard to continue with the next component.
Robot_5.prt
The next component is the long arm that extends off of the Robot_4 component. Use the entities in the next figure to create the pin connection for this component.
The fully assembled component looks like the following figure.
Use Applications, Mechanism and drag the component. You may need to click out on the small end cylinder to get it to show a rotation since the entire assembly will most likely want to rotate with it, as shown in the next figure.

Cancel the drag using the middle mouse button to return the assembly to its original state, and then go to Applications, Standard to bring in the next component.
Robot_6.prt
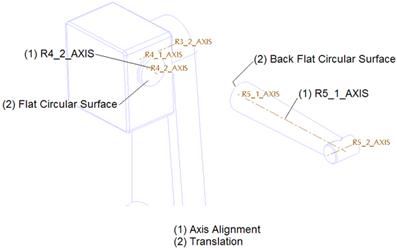
As we have been doing all along, create a pin connection for this component, using the following entities.
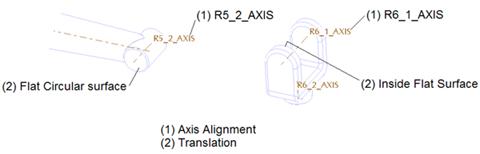
The fully assembled component looks like the following figure.
Again, drag this component to make sure it works. You will start to have to work a little harder to get the component to move, but the rest of the assembly should behave properly.
Cancel this drag and return to the Applications, Standard to assemble the last component.
Robot_7.prt
The last component will use the following entities to create the pin connection.
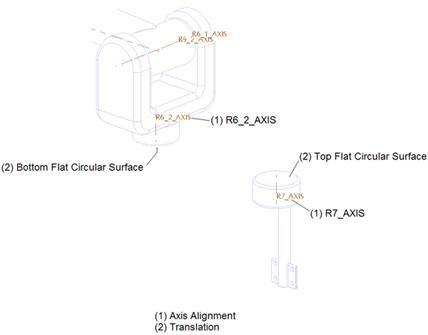
Once fully assembled, it will look like the following figure.

Go to Applications, Mechanism and drag this component. You will most likely not be able to see it spin, because the rest of the assembly will move more than this will, but it should be okay.

Cancel the drag using the middle mouse button, and return to Applications, Standard to get out of mechanism mode. Save and close this assembly.
LESSON 3 – Joint Axis Settings
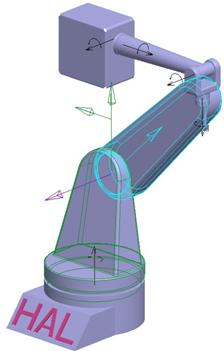
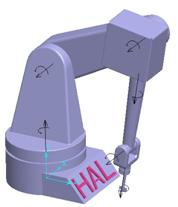
We will start by opening up the robot assembly that we created in lesson 2. It will come in looking like the following figure.

We will start by selecting on the first joint axis (labeled 1 in the exercise) and then go to its “Joint Settings”. The zero value for this joint should be correct, therefore we will not need to set a new zero value.
Click on the Regen Value tab, and select the check box to regenerate at “0” degrees, as shown below.

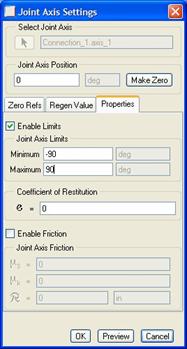
Next, click on the Properties tab, and enter -90 for the Minimum field, and 90 for the Maximum field, as shown in the next figure.
Click on OK to complete the joint axis settings for this first pin joint. Next, go to the joint axis settings for the second pin joint (labeled 2 in the exercise). This pin joint’s current zero value has the arm going straight up. We actually want the starting point of the arm to be at -45 degrees from its current value.
Therefore, we will enter -45 in the field at the top of the window as shown below.

When we do this, the joint updates in the assembly window, as we can see in the following figure.
NOTE: Only the arm updated, the rest of the components are still in their original position for now.
The arm’s new position will become the new zero location, therefore, click on Make Zero to make this new position the global zero value. Next, go to the Regen Value tab and set it to regenerate the joint at “0” degrees, as shown in the next figure.

Then, go to the Properties tab and set the Minimum value to -90 and the Maximum value to 45, as shown in the following figure.

Once you click on OK, click on Mechanism, Connect. You will get the following window.

Click on Run, and the model will update to its new zero location, and you will get the confirmation window to accept or reject this update, as shown in the next figure.
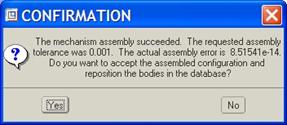
Click on Yes to accept this change, and then your assembly will look like the following.

Now, we will go to the third joint axis (labeled 3 in the exercise). This joint’s current zero location causes the arm to hang down at a 45 degree angle. Therefore, we want to reset its zero location to cause it to be horizontal with the ground.
Therefore, in the joint axis settings window, enter a value of 45, which will then make the arm move up to a horizontal position. Once there, click on the Make Zero button to make this the new zero.
Now that we have the new zero location, we will click on the Regen Value tab and click on the check box to force the model back to its zero location on regeneration, as shown below.

In the Properties tab, we will set the Minimum value to -90 and the Maximum value to 90, as shown in the next figure.

Click on OK to complete the joint settings, and then use Mechanism, Connect from the menu bar to regenerate the assembly. Click on Run, followed by Yes to accept the new location, as shown below.
Go to the joint axis settings for the fourth pin connection, and set it to regenerate at 0 and set the limits to -90 and 90 (Minimum and Maximum respectively). We do not need to reset its zero value. The joint settings windows for the Regen Value and Properties tabs look like the following:


Click on OK to complete this joint axis setting.
For the fifth pin connection, we are going to repeat this same process, but the limits will be from 0 (at the Minimum) to 180 (at the Maximum). The joint axis settings window for Properties will look like the following figure.

Be sure to click on the Regen Value tab and activate the regeneration check box, and then click on OK to finish this pin connection settings.
The last pin connection (labeled 6 in the exercise) will have a limit range of -90 to 90. Therefore, the Regen Value and Properties windows will look like the following figures.


Click on OK to complete the settings, and then go to Applications, Standard to exit mechanism mode. Our assembly will now look like the following.

Save and close this assembly.
LESSON 4 – Drag
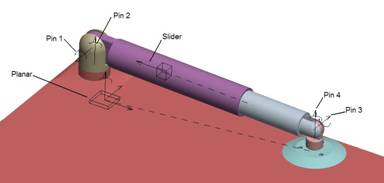
When you try dragging the mirror around, you will notice that it is all over the place. There is a “Planar” constraint that was added to try to minimize the complete chaos that would be there without it, but I left the rest of the constraints limited to pin joints.
With more constraints, such as additional “Planar” or even some “Slot-Follower” connections, we could get the exact feel of the accordion mirror.
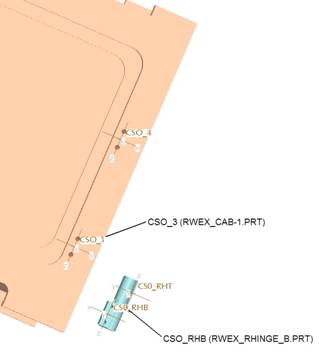
Fixing the base hinges:
To fix the hinges at the base, we will begin by going to the
drag tool, and then click on the Constraints tab. Click on the ![]() icon, and
select the large rounded base (Mirror_Base.prt) component as the ground,
and then select one of the two hinges (Base_Hinge.prt). After you pick
one of them, hold down the Ctrl key and select the second one. Once
both of the hinges are selected, click on the middle mouse button.
icon, and
select the large rounded base (Mirror_Base.prt) component as the ground,
and then select one of the two hinges (Base_Hinge.prt). After you pick
one of them, hold down the Ctrl key and select the second one. Once
both of the hinges are selected, click on the middle mouse button.
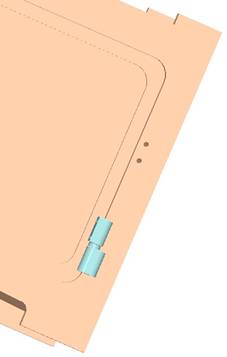
Fixing the mirror at the top:
The second piece we want to lock is the mirror at the top. While we still have the base hinges locked in the drag window, click on the lock/unlock icon again. This time, pick the Mirror_Hinge2.prt component as the ground part, and then select the round mirror at the top. Once the mirror has been selected, click on the middle mouse button to lock this in place.
This time, when you drag, the bars in the middle are the only objects rotating about their hinges.
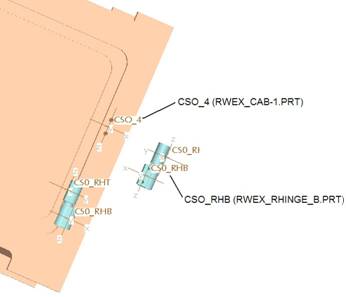
Making the bars parallel:
While you still have the bars separated, go back to the drag
window (if it is still open from before, close the existing window to clear the
constraints, then re-open it again). On the Constraints tab, click on
the ![]() icon,
and then select the following two surfaces (shaded in the following figure for
better clarity).
icon,
and then select the following two surfaces (shaded in the following figure for
better clarity).
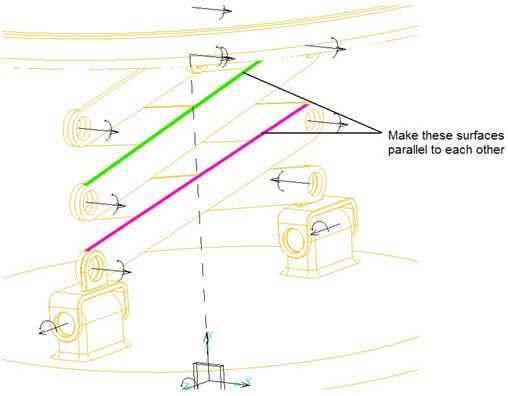
Then, rotate the model around and repeat this process for the equivalent lower 2 bars on the other side. When you drag the assembly up this time, it will be more realistic.
Return to the original orientation using Mechanism, Connect and then save and close the assembly.
LESSON 5 – Snapshots
Open up the Robot assembly that we have been working
on. It should be in its original configuration – if not, use Mechanism,
Connect to get it back to the zero locations. Then, click on the Drag
tool and go to the Constraints tab. In conjunction with the ![]() constraint
tool, add each joint axis that needs to be changed. Any of the ones in the
figure that show a value of 0 will not need to be added.
constraint
tool, add each joint axis that needs to be changed. Any of the ones in the
figure that show a value of 0 will not need to be added.
Fully_Extended
Change the joint axis settings to their correct values based off of the figure in the exercise, and then click on the Take Snapshot icon in the upper left corner of the Drag window.
Rename this snapshot to “Fully_Extended” – remembering not to forget the “_” between the words. The model at the time of this snapshot will look like the following.

Compressed
Then, go back to the joint axis constraint and change the values to the ones shown in the third figure of the exercise. Once the model looks correct, click on the Take Snapshot icon again, and save this snapshot as “Compressed”. It will look like the following.
Once you have both snapshots created, highlight both of them
and click on the Make Available for Drawings icon ( ![]() ). The drawing symbol
shows up beside the snapshot names in the Drag window, as shown below.
). The drawing symbol
shows up beside the snapshot names in the Drag window, as shown below.

Save the assembly. Then, create a new drawing called Robot. Make sure that the Robot.asm assembly is the active model, and select an E size sheet. When the drawing opens, change the scale to ¼.
Next, add a General, Exploded view, using the Fully_Extended state, and place it on the drawing. Use a LEFT orientation for this view.
Finally, add another General, Exploded view using the Compressed state, and place it to the right of the first view, using a LEFT orientation as well.
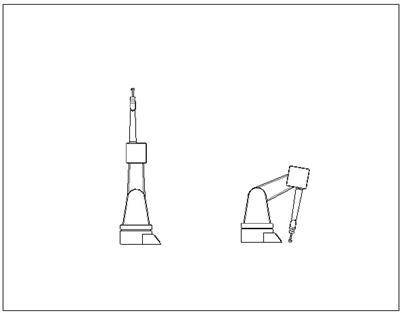
The final drawing looks like the following figure.
Save and close the drawing and the assembly.
LESSON 6 – Servo Motors
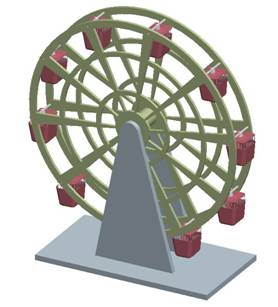
Fan.asm
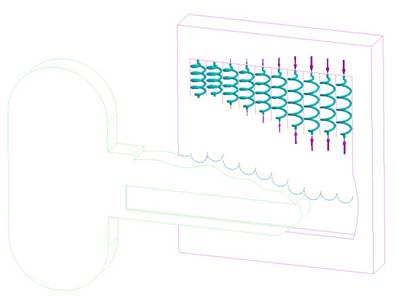
The goal for this exercise is to edit the existing servo motor for this fan assembly to make the blades spin at 1200 RPM. The first thing we need to do is convert this number into a degrees per second amount.
![]()
Therefore, we will go back into Mechanism mode for the fan
assembly, and then click on the servo motor tool ( ![]() ). The window will appear
showing us our existing servo motor.
). The window will appear
showing us our existing servo motor.

Click on the existing servo motor (CW_Rotation), and then click on Edit. This will bring you into the servo motor window. Click on the Profile tab, as shown below.

If you recall from the last time we set up this servo motor, we were controlling the motor by position. This time, we will change the Specification from “Position” to Velocity, as shown in the next figure.
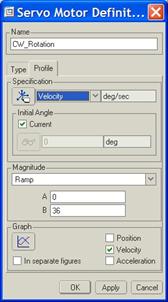
We can see that the default units for Velocity are deg/sec. But, we don’t want to have the velocity ramp up, so we will change the Magnitude from “Ramp” to Constant, and enter a value of 7200, as we can see in the next figure.

We are done defining the servo motor for this new motor specification, so we can click on OK, followed by Close in the Servo Motors window.
We are not done, however, because we need to go and edit the
analysis. Therefore, click on the Analysis icon ( ![]() ), which brings up the
following window.
), which brings up the
following window.
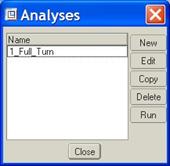
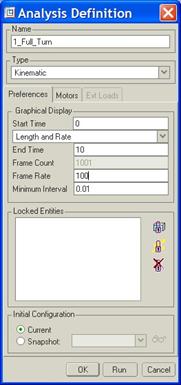
We will go ahead and edit our existing analysis, therefore, click on the 1_Full_Turn analysis, and then click on Edit. This will bring us back into the definition for this analysis, as shown in the next figure.

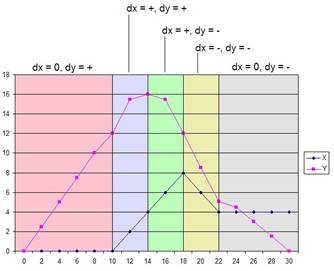
Let’s stop to think for a minute. We are trying to animate 7200 degrees every second. Currently, we are set at a frame rate of 10 frames per second. So basically, that means that every frame we capture will represent 720 degrees (2 complete revolutions).
Can anybody see a problem with that? If we are only taking a “picture” of the fan every 720 degrees, it won’t look like the fan is moving. Therefore, we need to change the frame rate. The following table shows us a sample of “pictures” that we would get for different frame rates.
|
Frame Rate |
Total Number of Frames (10 sec. Animation) |
Degrees Per Frame Captured |
|
10 |
101 |
720 |
|
25 |
251 |
288 |
|
50 |
501 |
144 |
|
75 |
751 |
96 |
|
100 |
1001 |
72 |
|
150 |
1501 |
48 |
|
200 |
2001 |
36 |
The trade-off that we have is that as we increase the frames per second number, we get a better snapshot of the fan moving (200 frames per second captures a picture every 36 degrees of rotation). But, the higher the frames per second you go, the more frames it will take to generate the 10 second animation, thus the amount of time it will take to run the analysis and generate a movie later on will be a lot longer.
Therefore, we will settle for 100 frames per second for now, just to give you a feel for what is going on.
In the Analysis Definition window, change the Frame Rate to 100, as shown in the following figure.
Then, click on the Run button to check it out. You will see the blades spinning, and in the lower right corner, you will get a status bar and a red stop sign. In my case, the blades were spinning counter-clockwise. To fix this, you can either stop the analysis (by clicking on the red stop sign until it stops), or wait until the end and go back and edit the servo motor.
Therefore, click on OK to get out of this analysis window, followed by Close on the next window. When you edit the servo motor, you can either click on the Flip button again, or edit the velocity to -7200. In this case, we will use the Flip button and keep the velocity at a positive 7200.
When we get back to the analysis window, highlight the existing analysis and hit the Run button from this window (instead of editing the analysis and running it within the analysis definition itself). Click on Yes to overwrite the existing results file. The fan should be spinning the correct direction this time.
Once the analysis is done, click on Close from the
analysis window, and then go to the results playback tool ( ![]() ). This will bring up
the following window.
). This will bring up
the following window.

Click on the play button in the upper left corner to watch the animation. Once you are done, click on the Save button (little blue disk icon) to save the results to your working window. Close out of this window, then save and close the assembly.
To see an MPEG movie for this animation, open up the Fan_1200rpm.mpg movie file from the training directory.
Zero_Refs.asm
For this assembly, we are creating a servo motor that will open up our lid, and another one that will close the lid.
We must create two separate servo motors, because we can not change the ramp value to be positive and then negative in the same motor.
Therefore, enter mechanism mode for this assembly, and then click on the Servo Motors tool. Create a new servo motor called Open_Lid and then pick on the pin joint in the assembly. Go to the Profile tab, and enter the following values for the Ramp magnitude.

Remember, the reason we must use a -18 value is because a -90 angle is fully opened. Therefore, to cover the entire 90 degrees in 5 seconds, we have to put in a slope of 18. When we click on the graph tool, and click on the dot that is located at Time=5.0, we can see the following.
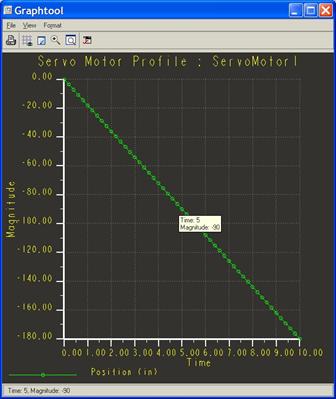
This confirms that our motor is correct. Now, we need to create a servo motor that will close the lid. Close out of this graph window, and then click on OK to complete our first motor.
Click on New to create a new servo motor. Call this motor Close_Lid, and select the same pin joint. Go to the profile tab on this motor, and enter the following Ramp values.

There is a particular reason we have to set A=-90. Had we used A=0 and B=18, we would have gotten a positive 90 degree range in 5 seconds, BUT, the starting angle for this motor would have set the model at 0 degrees (the closed position). This is a bad thing, as we want the second motor to start out at -90 degrees.
Click on the graph icon to see what these values do for us.
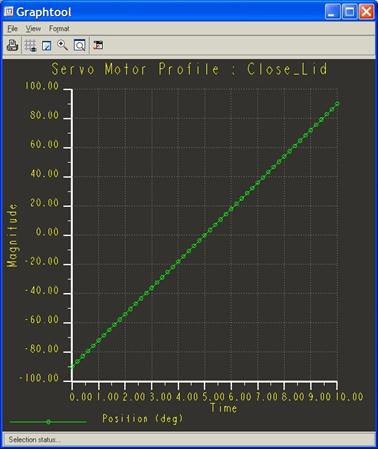
As you can see, when the motor first starts up, it will set the joint axis at -90 degrees. At Time=5.0, the magnitude is ~0. At Time=10, the magnitude would be 90 degrees. Therefore, in a five second range, we will go back 90 degrees.
Close this graph window and then click on OK to finish out of this servo motor, and then click on Close to get out of the Servo Motors window. Now we must define our analysis.
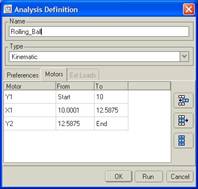
Click on the analysis tool, and enter a name of Lid_Motion. Down at the bottom, we want to set the initial condition to the Closed snapshot. Therefore, click on the little radio button next to the word Snapshot, and select the Closed snapshot from the pull-down list of available snapshots. The window will look like the following.

We will leave the time and frame information alone. Now, click on the Motors tab to define the start and stop times of the two servo motors. There’s another trick here. Whenever you have two or more servo motors on the same joint, and they are going to run back-to-back (as they are in this example), you must put in a small time gap between them to give it time to complete the first motor before starting the second one.
Therefore, we will run the Open_Lid motor from the start of the animation (Time=0) to five seconds (Time=5). We will then start the Close_Lid motor at Time=5.0001 (to give it time to finish the first one), and then stop at the end (Time=10).
Our window should look like the following.

Do not click on Run yet. We will finish out of this window first by clicking on OK. From the Analyses window, highlight this analysis and then hit Run. It will start out okay, but at the midway point (-90 degrees – fully open), we get an error that says the following.

There could be a number of different things that could cause this, but the most likely is the limits that we have set on the joint axis. Therefore, click on Abort to stop the analysis and then Close to exit the Analyses window.
Back in the joint axis settings for this pin joint, disable the limits by un-checking the little box, as shown below.

Click on OK and then return to the Analyses window, select the analysis in the list, and then click on Run. We will be asked to confirm the overwriting of the existing result set, as shown below.
Click on Yes, and the animation should run without any errors this time. Open up the results window to play back the animation and to save the playback file. Then save this assembly and close it.
LESSON 7 – Animation Playback
Zero_Refs.asm
We will begin by opening up this assembly and going to mechanism mode. Next, we will click on the Analyses tool, and delete the existing analysis. Finally go to the Servo Motors tool, and delete all servo motors in this list.
While we are still in the servo motor window, we will create a new servo motor and call it Open_Up. For the profile, we know that we want the animation to be 15 seconds long, and we need to travel -90 degrees in that time to cause the lid to open up completely.
Therefore, our Ramp values have to be A=0 and B=-6, as shown below.

Click on OK to complete this motor, and then create a new analysis, called 15Sec_Run. Set the end time to 15 and the Frame Rate to 24. Be sure to use the Closed snapshot as the starting position, as shown below.
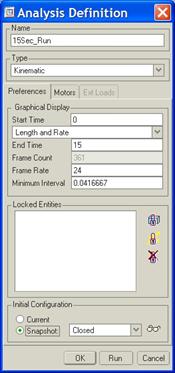
Click on Run, and your lid should open up to 90 degrees. Click on OK once this has finished. Close out of the Analyses window, and go to the results playback tool. On the first window, click on the Create a motion envelope tool. When the window appears, set the level to 5 and then create the envelope (zero_refs_env0001). We will open up this part last.
Close out of the motion envelope window, and then click on the play button. In the player window, click on Capture and create your MPEG file. Once this is done, save your playback and then save and close your assembly.
Open up the envelope part that we created, and it should look like the following.

Close out of this part.
LESSON 8 – Advanced Servo Motors
The first thing we are going to need to do before we can run the analysis is to go back to all of the joint axes and uncheck the limit box (turn off limits). Once that is done, we can get a successful analysis, and therefore a successful animation.
There are two different ways to approach this exercise with servo motors. We will go into great detail with one of them.
11 Ramp Servo Motors
We could create 11 servo motors (two for joints 1-5 and 1 for joint 6) using the Ramp option, but that is more work and bookkeeping. The trick in doing this would be to make one positive and one negative servo motor, and then set the times for start and end in the analysis correctly. This is a perfectly acceptable way of doing this, but we are going to demonstrate the other way.
5 User Defined Servo Motors and 1 Ramp Servo Motor
We can reduce our servo motor headcount by 5 motors, and simplify our analysis setup using User Defined profiles for the servo motors. Therefore, based on the joint numbers in the exercise figure, we will start creating the motors.
Joint 1 – User Defined Servo Motor 1
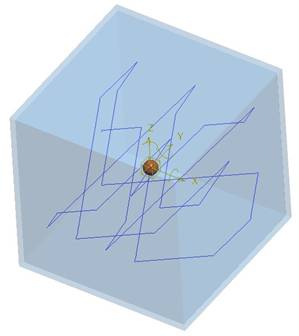
We will first use Mechanism, Connect to make sure our assembly is at its starting position for all axes (0 degrees). Then we will go to the Servo Motors tool. Click on New to create a new servo motor, and call it 1_Move (or your own name). Select Joint Axis #1 indicated in the exercise figure.
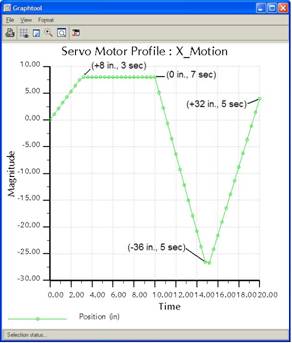
Based on the table information listed in the exercise, we plan to move this joint -45 degrees in the first 5 seconds of the 30 second animation. Then, it holds from Time=5 to Time=25. For the last 5 seconds, it moves back 45 degrees to the starting point of 0. Therefore, we need to create a User Defined profile based on Position, and enter the three expressions and time domains shown in the following figure.

Click on the graph to make sure it looks correct. Then click on OK to complete this first servo motor.
Joint 2 – User Defined Servo Motor 2
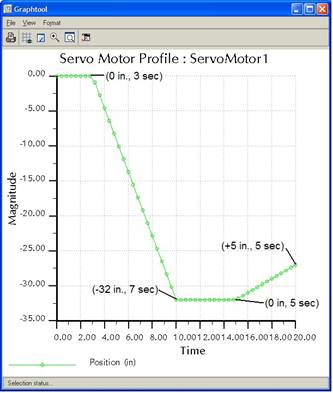
We are going to do a similar thing with the next servo motor. We know that joint 2 is going to start moving from 0 degrees to -90 degrees at Time=5 seconds, and will finish in 5 seconds. At Time=25 seconds, it starts to go back to 0 degrees and ends at 30 seconds.
The servo motor profile for this joint looks like the next figure.

Again, check the graph to make sure it looks right, then click on OK.
Joint 3 – User Defined Servo Motor 3
This joint does the same thing the last joint did, only in the opposite direction (90 degrees instead of -90 degrees). Therefore, you could copy this motor, rename it to 3_Move, pick the third joint axis to use, and then edit the profile to look like the following.

Check the graph to verify that it is going to a positive 90 degrees, and then click on OK.
Joint 4 – User Defined Servo Motor 4
This is an exact copy of 2_Move, except for the name, and which joint axis it points to. Perform a copy of 2_Move and then edit it. Rename it to 4_Move, and select the fourth joint axis according to the exercise figure. The profile should look like the following.

Verify its graph and then click on OK.
Joint 5 – User Defined Servo Motor 5
This joint will be different, but we could still copy 4_Move, rename it to 5_Move, and select on the fifth joint axis. Edit the profile for the time domain and expression to look like the following.

Joint 6 – Ramp Servo Motor 1
This is the last servo motor that we need to create. Create a new one and call it 6_Move, and pick on the axis labeled 6 in the exercise figure. We are going to use a Ramp profile for this and enter A=0 and B=72 for the values. This will create a 720 degree rotation over 10 seconds. The window should look like the following.

Verify that the graph shows 720 degrees over 10 seconds, and then click on OK. Save your assembly.
Robot_Motion Analysis
Assuming that you have already removed the limits from the different joints, we are ready to create the analysis. We want to create a real 30 second animation, therefore, we need to change the end time to 30, and change the frame rate to 24.
We don’t have a snapshot to use, but we should be okay with the current position as long as we have run Mechanism, Connect to get back to the zero locations.
The first tab looks like the following figure.

Now, we need to set up the motors. Therefore, click on the Motors tab. The six different servo motors should be listed, and every one of them currently says Start and End for the start and end times respectively.
This is okay for all but 6_Move. We need to change the start time to 15 and the end time to 25. Once we do this, we can run the analysis.
We should see the exact motion that we expected. Once the analysis is done, go to the playback tools and save the results file. Using the play icon, run the animation through its motions. As it is animating, pan and zoom to get as close as you can to the robot and still see all of its moving parts. Then stop the animation, rewind it back to the beginning and then click on Capture to create your Robot_Motion.mpg MPEG movie.
Save and close your assembly at the very end.
LESSON 9 – Slider Connection
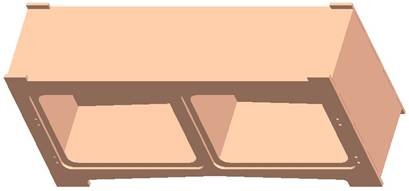
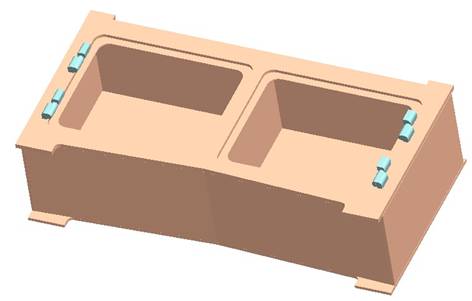
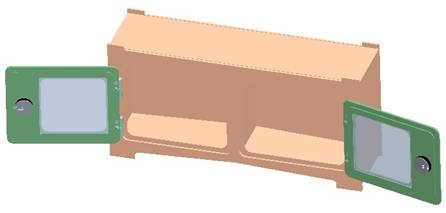
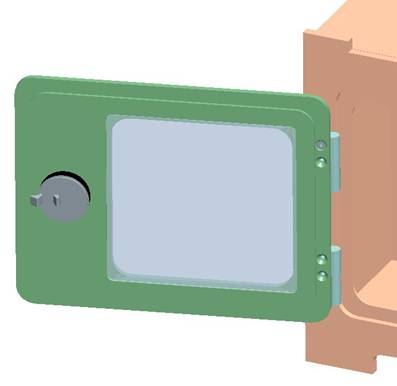
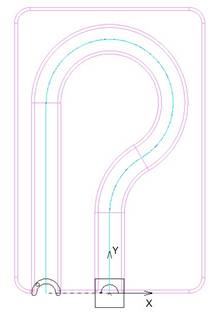
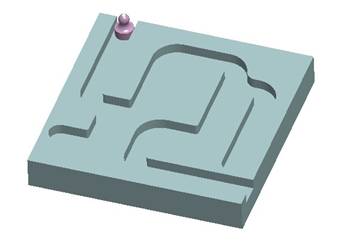
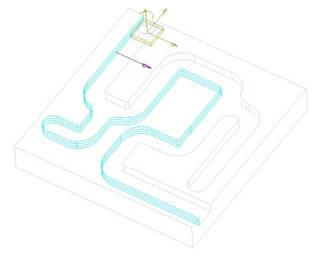
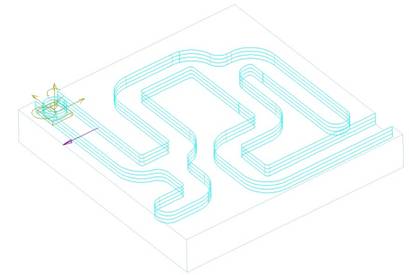
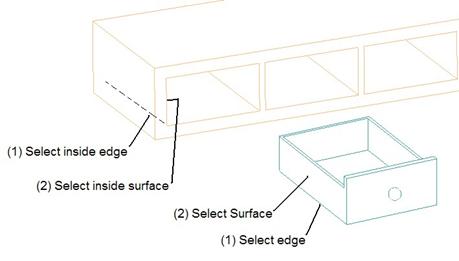
Open up the Storage_Drawer.asm assembly. It will initially look like the following.
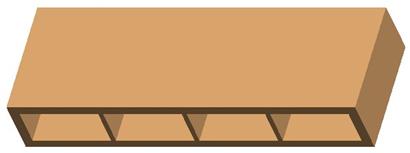
We are going to assemble in four drawers using slider constraints so each drawer will be able to open and close. We will then add four servo motors to be able to control the animation of the opening and closing of the drawers.
Drawer 1
Assemble in the Drawer.prt part file. In the Placement window, click on the Connect tab to access the mechanism constraint section. Be sure to select a Slider constraint if it is not already selected.
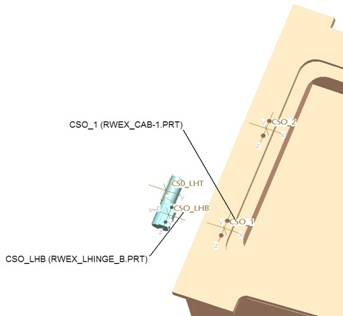
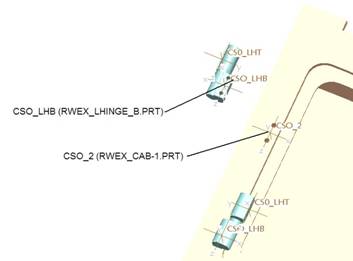
For the edge and plane alignments, select the references shown in the next figure.
Click on OK once the placement is complete, and then go to Applications, Mechanism to set the joint axis settings.
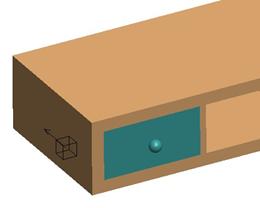
Click on the Arrow in the joint axis to highlight it in red, and then right mouse click and select Joint Settings. Type in a value of 0 for the position, and you will notice that it will place our drawer in the correct “closed” position. Therefore, click on the Regen Value tab, and enable the regeneration at “0”.
Use Mechanism, Connect to place the drawer in its closed state, as shown below.
Drawer 2, 3, and 4
Repeat this process to assemble in the remaining 3 drawers. Be sure each one of them is set to automatically regenerate at “0”. Now, we will go in and create our four servo motors.
Remember, we want to start by opening up the first drawer, followed by the second, then third and then fourth. Once all four drawers are open, we want to close them in the reverse order, starting with drawer 4, then 3, then 2 and then drawer 1. We want all of this to happen in 30 seconds.
Therefore, each drawer will need 3.75 seconds for each range of motion.
Servo Motors 1 & 2
Go to the servo motor tool, and create a new servo motor called D1_Open, and then pick on the Arrow for the first drawer’s joint axis. We will use a Ramp setting where A=0 and B=-1.067 (because we want the slope to be -4 inches in 3.75 seconds = -4/3.75 =
-1.0666666666666). Use the Graph tool to verify this condition is correct.
The window will currently look like the following.

Click on OK to complete this first servo motor, and then click on New to create another one. Name this one D1_Closed, and pick the same joint axis. For this one, we want it to start out at -4 inches, and then come back in with the opposite slope as the first one. Therefore, our ramp will be A=-4.0 and B=1.067, as shown in the next figure.

Click on OK to complete this servo motor.
Servo Motors 3 & 4
We will now create a new servo motor called D2_Open, and select the second joint axis. Use the same ramp values as the first one that we created. If we want, we can highlight the D1_Open, and then click on Copy, and just edit the name and the joint axis being used.
Create the second servo motor called D2_Closed to shut the drawer. The two servo definitions are shown below.


Servo Motors 5 – 8
Repeat this same process to create the remaining servo motors, called D3_Open, D3_Closed, D4_Open and D4_Closed respectively. Once all servo motors are defined, click on Close from the servo motor tool window.
Analysis
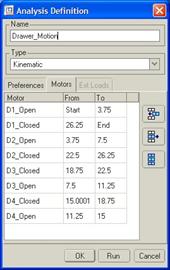
Now, create a new analysis called Drawer_Motion, and change the end time to 30 seconds, and the frame rate to 24. The window should look like the following.

Click on the Motors tab, and enter the appropriate start and end times. Be sure to know which motor you are currently editing, as they may not be in the order you expect – depending on when you created them.
The following figure shows my Motors window with the correct values.
NOTE: The D4_Closed Motor must start at 15.0001, because it is back to back with the D4_Open, and it is the same joint axis. The other ones do not need to do this, because it is always a different joint axis before and after it.
Click on Run to watch the animation work. Once you are done, open the playback window and save the playback results file. Create an MPEG movie of this animation. To see a completed animation, look at the SD_Final.mpg movie file in your directory.
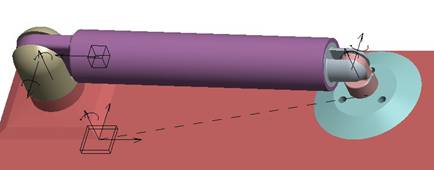
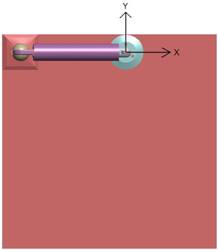
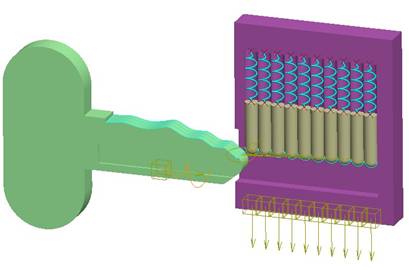
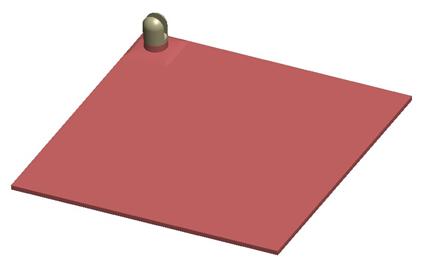
LESSON 10 – Cylinder Connection
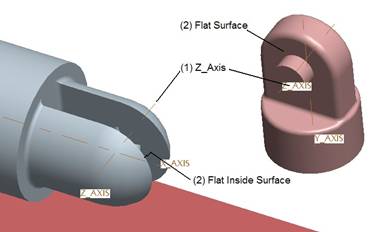
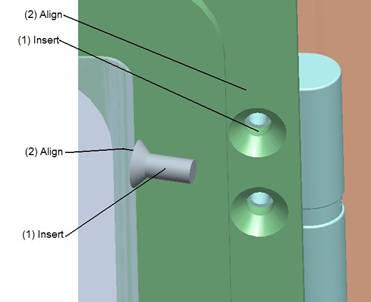
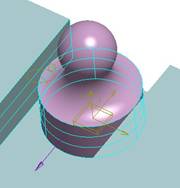
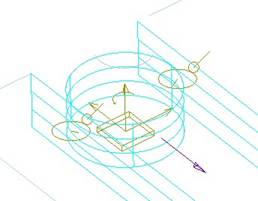
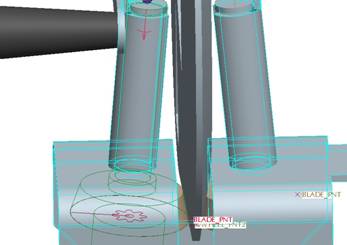
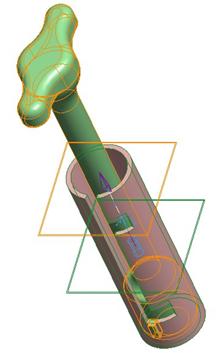
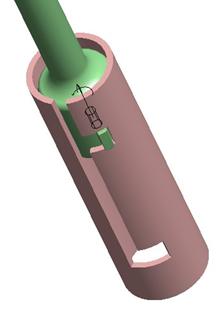
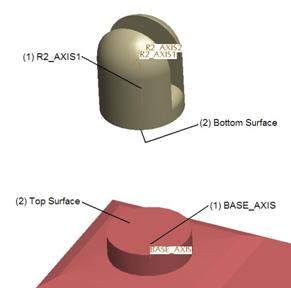
Open the assembly called Locking_arm.asm. It should already contain one component, called Notched_Cyl. We will start by assembling in the Cyl_Handle component. Make sure your datum axes are visible.
In the connections section of the placement window, change the connection type to Cylinder, as shown in the next figure.

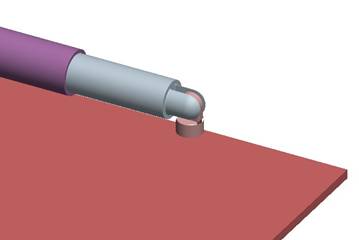
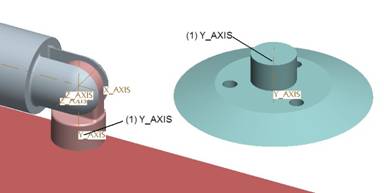
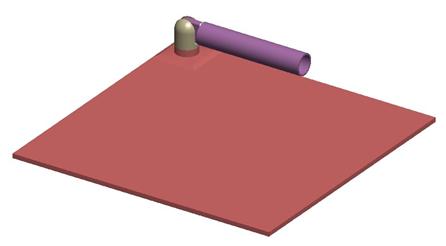
We only have to pick on an axis from the two parts. Therefore, select the Y_Axis from each component. Once both have been selected, the handle part will snap over to the cylinder. Click on OK to complete this placement, and our assembly will currently look like the following.

We can see that the tab on the handle is too far down. We will use joint axis settings to move it to the correct starting location, and zero it. Therefore, go to Applications, Mechanism and then click on the arrow portion of the joint symbol. Once selected, right mouse click and select Joint Settings.
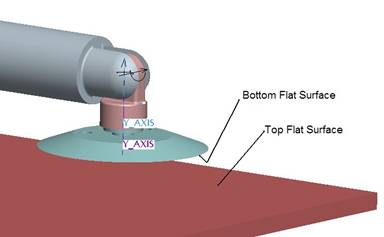
We can see from the model that if we just changed the value to “0”, it would not bring it up to the point that we want. This is shown in the next figure by the two highlighted planes.
In our joint settings window, we can see that we are currently sitting at 2.3125 inches above the green plane.

Therefore, we will use the zero references to pick the surfaces that we want to be at the zero location.
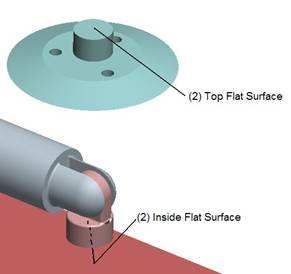
Click on the check box to specify references, and then pick on the two surfaces shown in the following figure.

Once we select these references, the joint settings window will indicate that our distance is now -4.0 inches.

Next, go to the Regen Value tab and be sure to regenerate the model at “0” from this point on.
When we click on OK, and then use Mechanism, Connect, our tab will now be at the right height, as shown in the next figure.

We now have to adjust the rotational part of this constraint. Therefore, highlight the entire joint axis symbol and then go to the joint settings tool. When inside this tool, enter 36 in the field to get the notch to rotate over to the correct position.
Once there, click on the Make Zero button, and then go to the Regen Value tab to set the regeneration at “0”. Click on OK, and then Mechanism, Connect to see the new starting point for our tab.
We can now set up our servo motors. We will need three motors that use different components of the joint axis.
Rotational Motor 1
The first motor that we will create will be called Top_Rotation. We want to select the entire joint axis symbol for this motor. It will use a Ramp profile where A=0 and B=-7.2 (to go -36 degrees in 5 seconds = -36/5). The window will look like the following.

Click on OK to complete this motor.
Translational Motor
Click on New to create another motor. Call this one Translation and be sure to only pick on the straight arrow portion of the joint axis symbol. Use a Ramp profile where A=0 and B=-0.35 (to translate down 3.5 inches over 10 seconds = -3.5/10). The window will look like the following.

Click on OK to complete this motor.
Rotational Motor 2
Create another new motor called Bottom_Rotation and pick the entire joint axis symbol again. Use a Ramp profile where A=0 and B=7.2 (to rotate 36 degrees in 5 seconds = 36/5). The window for this motor looks like the following.

Click on OK to complete this motor, followed by Close to finish servo motors. Now, we can create a new analysis.
Handle_Motion Analysis
Create a new analysis called Handle_Motion. On the default tab, change the end time to 20 seconds, and leave the other settings alone.
On the Motors tab, make sure that all three motors are listed. We will need to change the start and end times to the following:
Top_Rotation
Start Time = START
End Time = 5.0
Translation
Start Time = 5.0001
End Time = 15.0
Bottom_Rotation
Start Time = 15.0001
End Time = END
The window will look like the following.

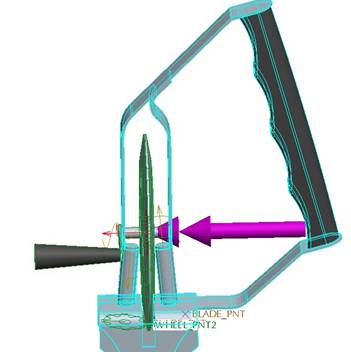
We can now click on Run to see the analysis go through the motion. What do you notice at the end of the translation? The tab seems to jump back to the 36 degree location, and then travel another 36 degrees into the part, as shown in the next figure.

Why does this happen?
If you remember from an earlier example with a lid opening and closing, the tab’s zero location is at 36 degrees. When the Bottom_Rotation servo motor starts up, it always goes to the zero location if A=0 in the Ramp setting.
To account for this, we will need to go back and edit the servo motor and change this value. Therefore, click on OK to complete the analysis definition, and then Close to get out of the analysis window.
Go back to the servo motors, and edit the Bottom_Rotation motor. On the Profile tab, change the ramp so that A=-36, and leave the other values alone. The window will look like the following.

Click on OK to complete this change, followed by Close to get out of the servo motor tool. Use Mechanism, Connect to set the model back to its starting position, and then go back to the analysis tool and run the analysis again. Do you notice a difference? This time it started it where it left off (at -36 degrees) and then traveled back to the zero location.
Play the results back and save a movie if you want. To view an already saved movie, open the Locking_Arm_1.mpg movie.
Save and close this assembly.
LESSON 11 – Planar Connection
Open up the Planar_Robot.asm assembly. It initially contains only the PRobot_1 base component. We are going to start by adding the next component. Make sure your datum axes are visible.
PRobot_2
Assemble in the PRobot_2.prt component. Use a Pin connection and select the following references to assemble it to the base component.
The component, when placed, should look like the following.
Go to Mechanism mode, and edit the joint axis settings for this pin connection. It should already be at the “0” location when assembled. Go to the Regen Value tab and specify the regeneration value at 0. Go back to Applications, Standard to bring in the next component.
PRobot_3
Now, assemble in the Probot_3.prt component. Use another pin connection for this component, and select the references shown in the next figure.

The final placement of this component in the assembly looks like the following.
We will not need to set a regeneration value for this pin joint, because the placement of later components will drive its initial position. Therefore, we are now ready to add the next component.
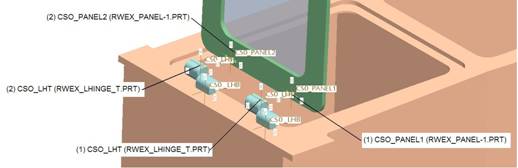
PRobot_4
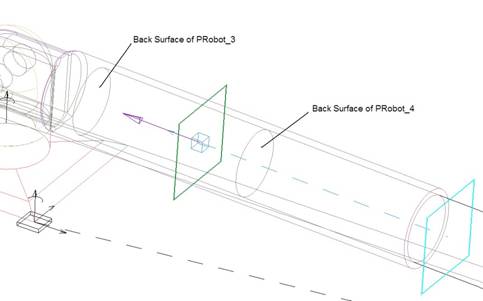
Assemble in the PRobot_4.prt component. We are going to use a Slider connection for this component to assemble it to the PRobot_3 part. When prompted, select the X_AXIS for each component, and the FRONT datum planes for each component. Then, while still in component placement mode, use Ctrl-Alt and the Right Mouse Button to move the component about half way into the other one, as shown in the next figure.